
Final working prototype.
As I have used servos to move things about in the past, I wondered what would happen if I made something that could walk? The idea progressed into a character that can walk using a simple gait, with pre-set motions or remote control. The controller I decided to develop is based on gestures.
The communication between the controller & qBot is via Bluetooth. On board qBot there are 4 servos, a sound module, sensors and a microprocessor. The controller uses 4 tilt switches to detect orientation of the users arm.
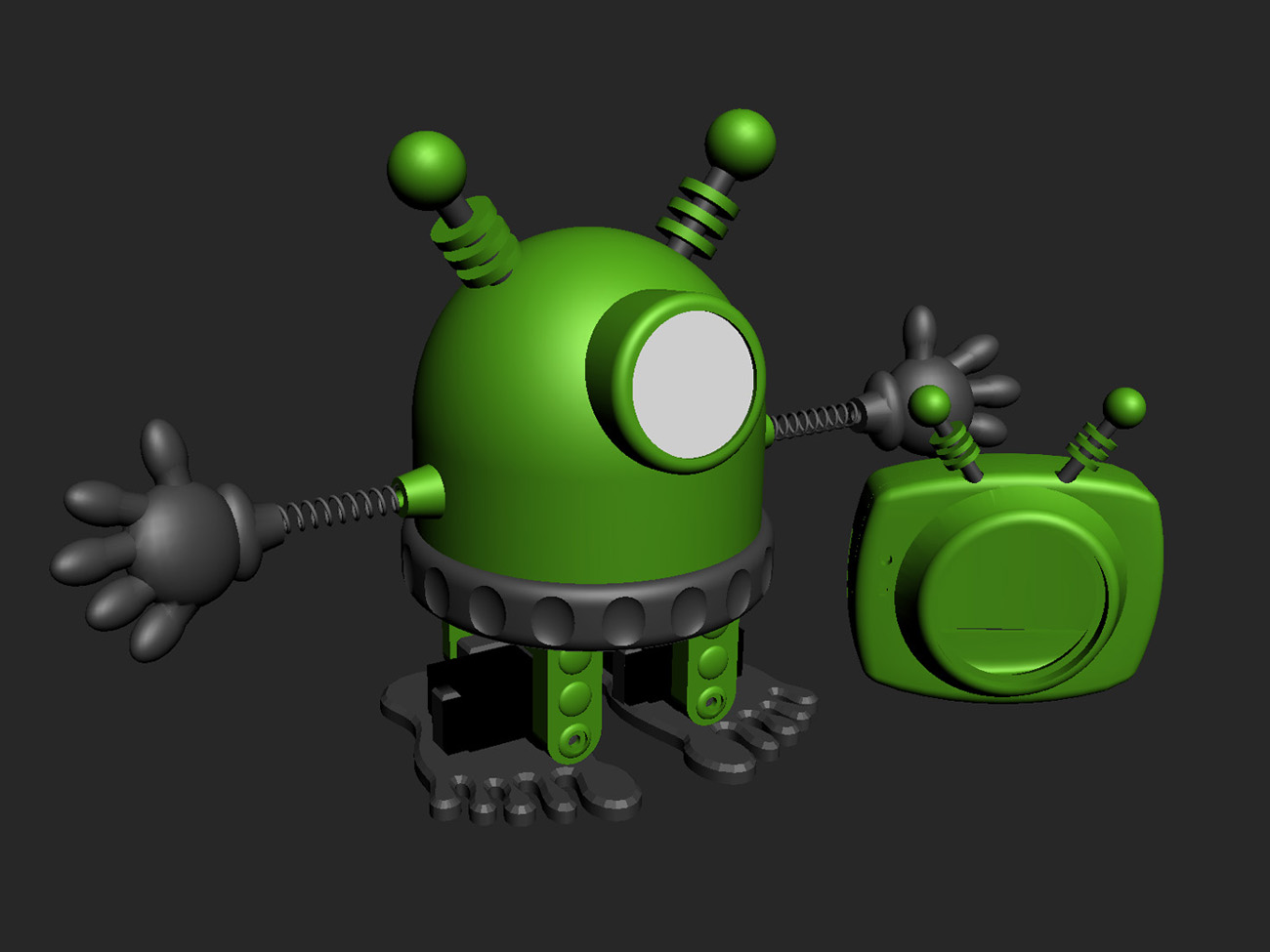
3D CAD.

3D print in ABS.
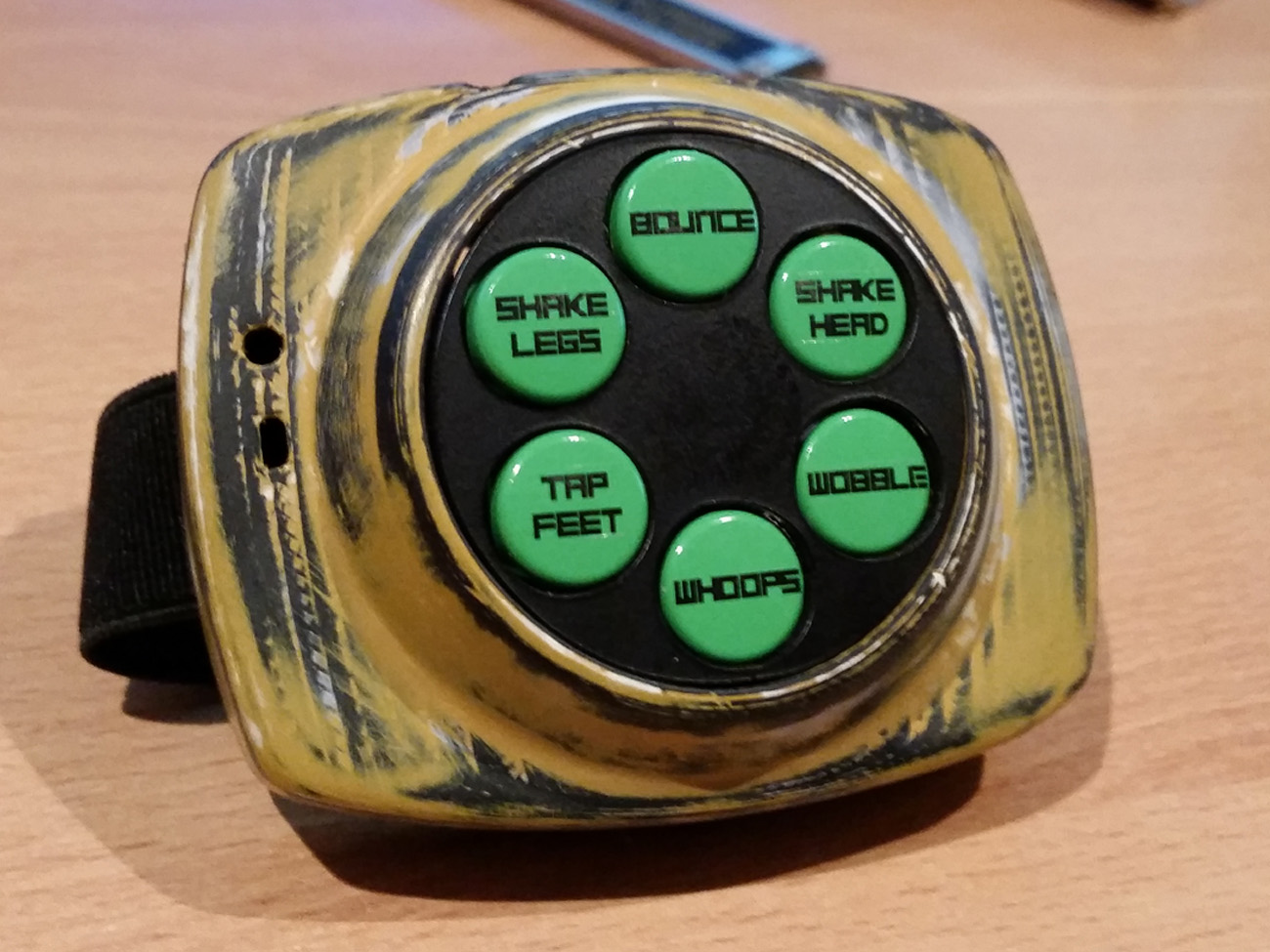
Hand controller 3D print.

Final hand controller design.

Final prototype paint & decal.

Led dot matrix display.
Prototype demo video.
Back to projects